第三课:矩阵
- 齐次坐标(Homogeneous coordinates)
- 变换矩阵(Transformation matrices)
- 模型(Model)、观察(View)和投影(Projection)矩阵
- 总结
- 练习
*引擎推动的不是飞船而是宇宙。飞船压根就没动过。* 《飞出个未来》
这是所有课程中最重要的一课。至少得看八遍。
齐次坐标(Homogeneous coordinates)
目前为止,我们仍然把三维顶点视为三元组(x,y,z)。现在引入一个新的分量w,得到向量(x,y,z,w)。请先记住以下两点(稍后我们会给出解释):
- 若w==1,则向量(x, y, z, 1)为空间中的点。
- 若w==0,则向量(x, y, z, 0)为方向。
(请务必将此牢记在心。)
二者有什么区别呢?对于旋转,这点区别倒无所谓。当您旋转点和方向时,结果是一样的。但对于平移(将点沿着某个方向移动)情况就不同了。”平移一个方向”是毫无意义的。
齐次坐标使得我们可以用同一个公式对点和方向作运算。
变换矩阵(Transformation matrices)
矩阵简介
简而言之,矩阵就是一个行列数固定的、纵横排列的数表。比如,一个2x3矩阵看起来像这样:

三维图形学中我们只用到4x4矩阵,它能对顶点(x,y,z,w)作变换。这一变换是用矩阵左乘顶点来实现的:
矩阵x顶点(记住顺序!!矩阵左乘顶点,顶点用列向量表示)= 变换后的顶点
这看上去复杂,实则不然。左手指着a,右手指着x,得到ax。 左手移向右边一个数b,右手移向下一个数y,得到by。依次类推,得到cz、dw。最后求和ax + by + cz + dw,就得到了新的x!每一行都这么算下去,就得到了新的(x, y, z, w)向量。
这种重复无聊的计算就让计算机代劳吧。
用C++,GLM表示:
glm::mat4 myMatrix;
glm::vec4 myVector;
// fill myMatrix and myVector somehow
glm::vec4 transformedVector = myMatrix * myVector; // Again, in this order ! this is important.
用GLSL表示:
mat4 myMatrix;
vec4 myVector;
// fill myMatrix and myVector somehow
vec4 transformedVector = myMatrix * myVector; // Yeah, it's pretty much the same than GLM
(还没把这些代码粘贴到程序里调试吗?赶紧试试!)
平移矩阵(Translation matrices)
平移矩阵是最简单的变换矩阵。平移矩阵是这样的:
![]()
其中,X、Y、Z是点的位移增量。
例如,若想把向量(10, 10, 10, 1)沿X轴方向平移10个单位,可得:
![]()
(算算看!一定得亲手算!!)
这样就得到了齐次向量(20,10,10,1)!记住,末尾的1表示这是一个点,而不是方向。经过变换计算后,点仍然是点,这倒是挺合情合理的。
下面来看看,对一个代表Z轴负方向的向量作上述平移变换会得到什么结果:
![]()
还是原来的(0,0,-1,0)方向,这也很合理,恰好印证了前面的结论:”平移一个方向是毫无意义的”。
那怎么用代码表示平移变换呢?
用C++,GLM表示:
#include <glm/gtx/transform.hpp> // after <glm/glm.hpp>
glm::mat4 myMatrix = glm::translate(glm::mat4(), glm::vec3(10.0f, 0.0f, 0.0f));
glm::vec4 myVector(10.0f, 10.0f, 10.0f, 0.0f);
glm::vec4 transformedVector = myMatrix * myVector; // guess the result
用GLSL表示:呃,实际中我们几乎不用GLSL计算变换矩阵。大多数情况下在C++代码中用glm::translate()算出矩阵,然后把它传给GLSL。在GLSL中只做一次乘法:
vec4 transformedVector = myMatrix * myVector;
单位矩阵(Identity matrix)
单位矩阵很特殊,它什么也不做。单位矩阵的身份和自然数”1”一样基础而重要,因此在这里要特别提及一下。

用C++表示:
glm::mat4 myIdentityMatrix = glm::mat4(1.0);
缩放矩阵(Scaling matrices)
缩放矩阵也很简单:

例如把一个向量(点或方向皆可)沿各方向放大2倍:

w还是没变。您也许会问:”缩放一个向量”有什么用?嗯,大多数情况下是没什么用,所以一般不会去缩放向量;但在某些特殊情况下它就派上用场了。(顺便说一下,单位矩阵只是缩放矩阵的一个特例,其(X, Y, Z) = (1, 1, 1)。单位矩阵同时也是旋转矩阵的一个特例,其(X, Y, Z)=(0, 0, 0))。
用C++表示:
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp>
glm::mat4 myScalingMatrix = glm::scale(2.0f, 2.0f ,2.0f);
旋转矩阵(Rotation matrices)
旋转矩阵比较复杂。这里略过细节,因为日常应用中,您并不需要知道矩阵的内部构造。 想了解更多,请看“矩阵和四元组常见问题”(这个资源很热门,应该有中文版吧)。
用C++表示:
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp>
glm::vec3 myRotationAxis( ??, ??, ??);
glm::rotate( angle_in_degrees, myRotationAxis );
累积变换
前面已经学习了如何旋转、平移和缩放向量。把这些矩阵相乘就能将它们组合起来,例如:
TransformedVector = TranslationMatrix * RotationMatrix * ScaleMatrix * OriginalVector;
!!!注意!!!这行代码首先执行缩放,接着旋转,最后才是平移。这就是矩阵乘法的工作方式。
变换的顺序不同,得出的结果也不同。您不妨亲自尝试一下:
- 向前一步(小心别磕着爱机)然后左转;
- 左转,然后向前一步
实际上,上述顺序正是你在变换游戏角色或者其他物体时所需的:先缩放;再调整方向;最后平移。例如,假设有个船的模型(为简化,略去旋转):
-
错误做法:
- 按(10, 0, 0)平移船体。船体中心目前距离原点10个单位。
- 将船体放大2倍。以原点为参照,每个坐标都变成原来的2倍,就出问题了。最后您得到的是一艘放大的船,但其中心位于2*10=20。这并非您预期的结果。
-
正确做法:
- 将船体放大2倍,得到一艘中心位于原点的大船。
- 平移船体。船大小不变,移动距离也正确。
矩阵-矩阵乘法和矩阵-向量乘法类似,所以这里也会省略一些细节,不清楚的读者请移步矩阵和四元组常见问题 。现在,就让计算机来算:
用C++,GLM表示:
glm::mat4 myModelMatrix = myTranslationMatrix * myRotationMatrix * myScaleMatrix;
glm::vec4 myTransformedVector = myModelMatrix * myOriginalVector;
用GLSL表示:
mat4 transform = mat2 * mat1;
vec4 out_vec = transform * in_vec;
模型(Model)、观察(View)和投影(Projection)矩阵
在接下来的课程中,我们假定您已知如何绘制Blender经典模型小猴Suzanne。
利用模型、观察和投影矩阵,可以将变换过程清晰地分解为三个阶段。虽然此法并非必需(前两课我们就没用这个方法嘛),但采用此法较为稳妥。我们将看到,这种公认的方法对变换流程作了清晰的划分。
模型矩阵
这个三维模型和可爱的红色三角形一样,由一组顶点定义。顶点的XYZ坐标是相对于物体中心定义的:也就是说,若某顶点位于(0,0,0),则其位于物体的中心。
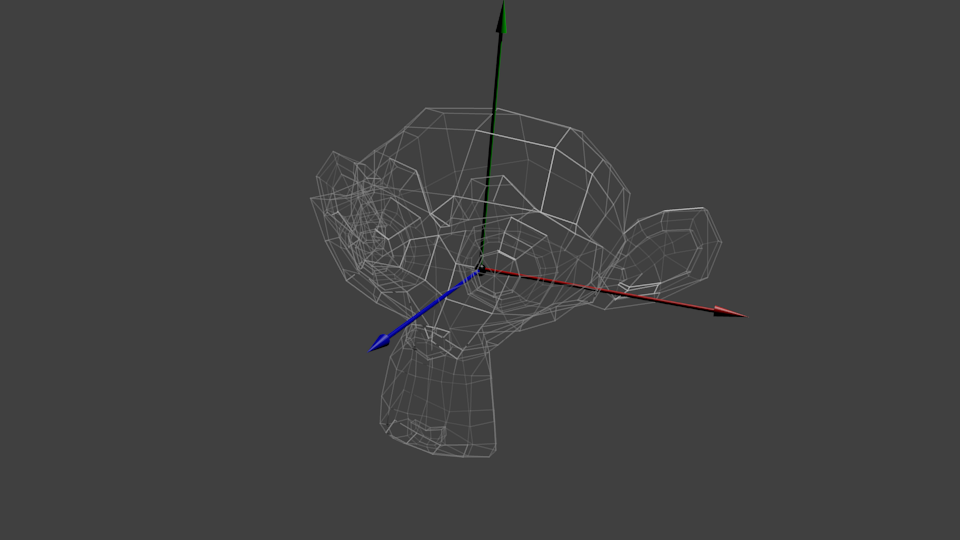
我们希望能够移动它,玩家也需要用键鼠控制这个模型。这很简单,只需记住:缩放旋转平移就够了。在每一帧中,用算出的这个矩阵去乘(在GLSL中乘,不是在C++中!)所有的顶点,物体就会移动。唯一不动的是世界空间(World Space)的中心。
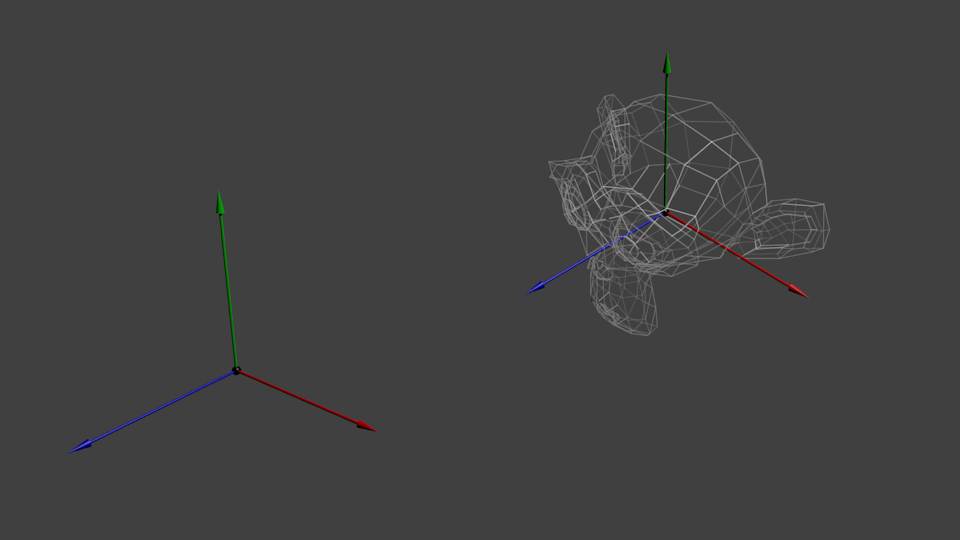
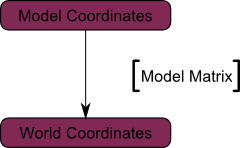
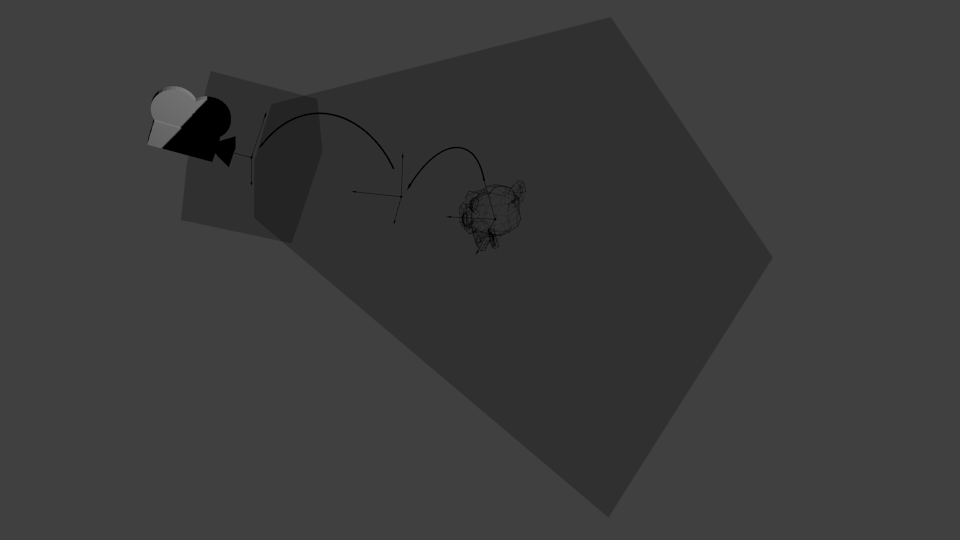
现在,物体所有顶点都位于世界空间。下图中黑色箭头的意思是:从模型空间(Model Space)(顶点都相对于模型的中心定义)变换到世界空间(顶点都相对于世界空间中心定义)。
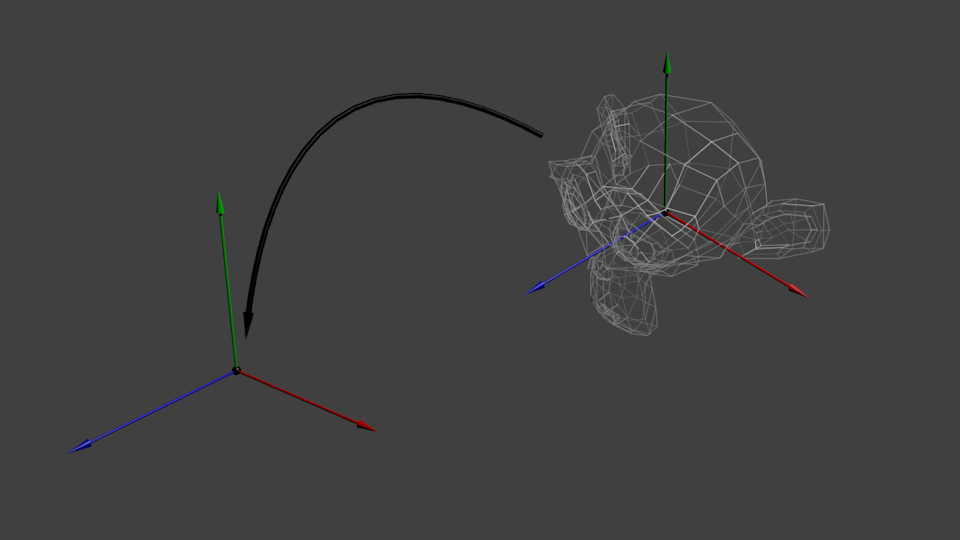
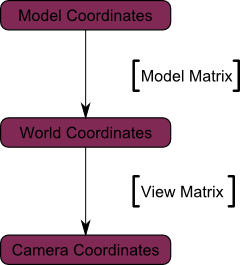
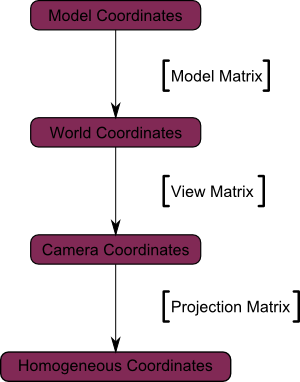
下图概括了这一过程:
观察矩阵
这里再引用一下《飞出个未来》:
*引擎推动的不是飞船而是宇宙。飞船压根就没动过。*
仔细想想,摄像机的原理也是相通的。如果想换个角度观察一座山,您可以移动摄像机也可以……移动山。后者在实际中不可行,在计算机图形学中却十分方便。
起初,摄像机位于世界坐标系的原点。移动世界只需乘一个矩阵。假如你想把摄像机向右(X轴正方向)移动3个单位,这和把整个世界(包括网格)向左(X轴负方向)移3个单位是等效的!脑子有点乱?来写代码吧:
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp>
glm::mat4 ViewMatrix = glm::translate(glm::mat4(), glm::vec3(-3.0f, 0.0f, 0.0f));
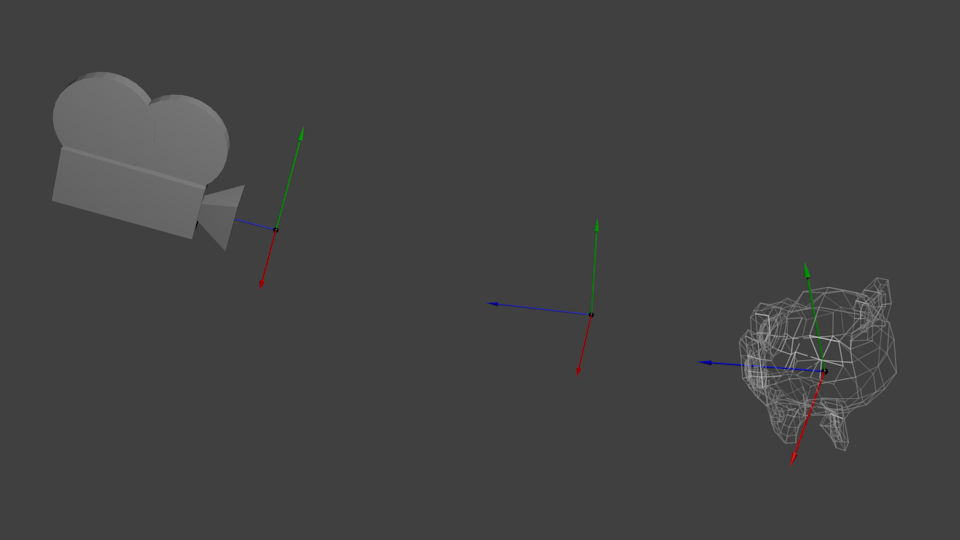
下图展示了:从世界空间(顶点都相对于世界空间中心定义)到摄像机空间(Camera Space,顶点都相对于摄像机定义)的变换。
趁脑袋还没爆炸,来欣赏一下GLM强大的glm::LookAt函数吧:
glm::mat4 CameraMatrix = glm::LookAt(
cameraPosition, // the position of your camera, in world space
cameraTarget, // where you want to look at, in world space
upVector // probably glm::vec3(0,1,0), but (0,-1,0) would make you looking upside-down, which can be great too
);
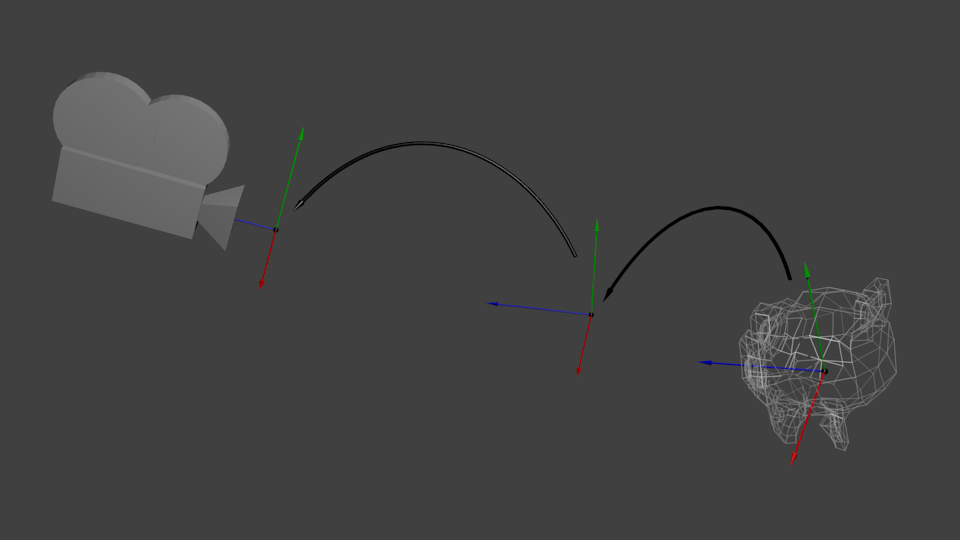
下图解释了上述变换过程:
好戏还在后头呢。
投影矩阵
现在,我们处于摄像机空间中。这意味着,经历了这么多变换后,现在一个坐标X==0且Y==0的顶点,应该被画在屏幕的中心。但仅有x、y坐标还不足以确定物体是否应该画在屏幕上:它到摄像机的距离(z)也很重要!两个x、y坐标相同的顶点,z值较大的一个将会最终显示在屏幕上。
这就是所谓的透视投影(perspective projection):
好在用一个4x4矩阵就能表示这个投影¹ :
// Generates a really hard-to-read matrix, but a normal, standard 4x4 matrix nonetheless
glm::mat4 projectionMatrix = glm::perspective(
glm::radians(FoV), // The vertical Field of View, in radians: the amount of "zoom". Think "camera lens". Usually between 90° (extra wide) and 30° (quite zoomed in)
4.0f / 3.0f, // Aspect Ratio. Depends on the size of your window. Notice that 4/3 == 800/600 == 1280/960, sounds familiar ?
0.1f, // Near clipping plane. Keep as big as possible, or you'll get precision issues.
100.0f // Far clipping plane. Keep as little as possible.
);
最后一个变换:
从摄像机空间(顶点都相对于摄像机定义)到齐次坐空间(Homogeneous Space)(顶点都在一个小立方体中定义。立方体内的物体都会在屏幕上显示)的变换。
最后一幅图示:
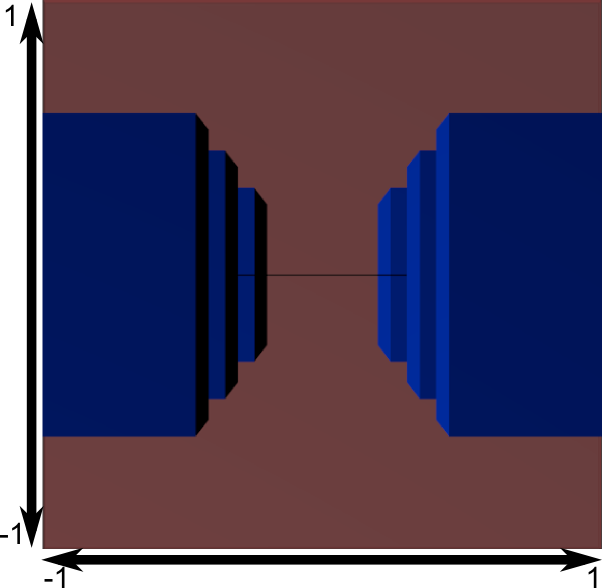
再添几张图,以便大家更好地理解投影变换。投影前,蓝色物体都位于摄像机空间中,红色的东西是摄像机的平截头体(frustum):这是摄像机实际能看见的区域。
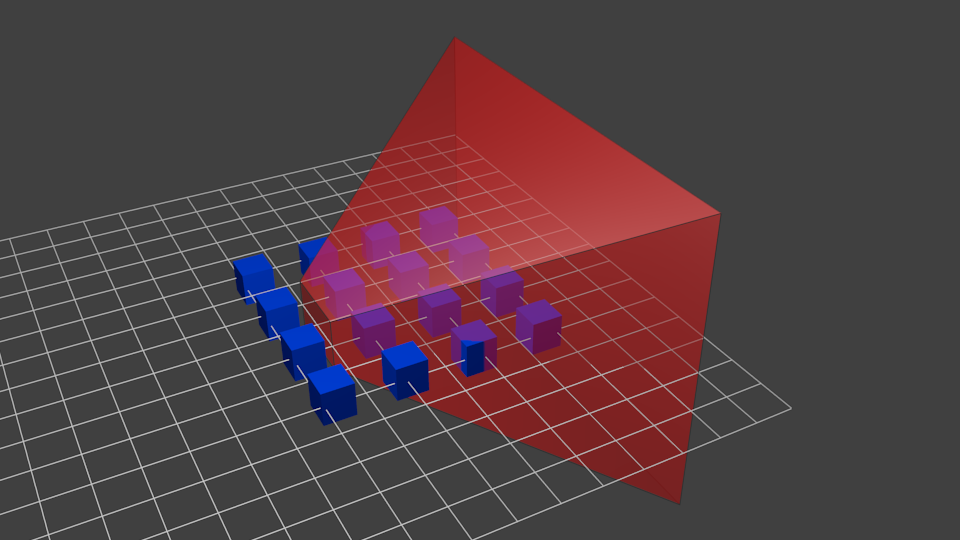
用投影矩阵去乘前面的结果,得到如下效果:
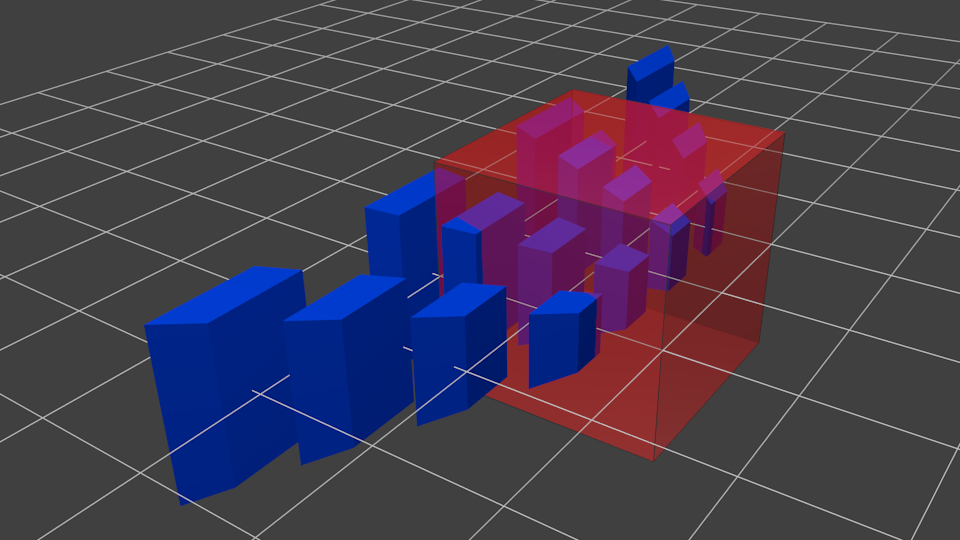
此图中,平截头体变成了一个正方体(每条棱的范围都是-1到1,图不太明显),所有的蓝色物体都经过了相同的变形。因此,离摄像机近的物体就显得大一些,远的显得小一些。这和现实生活一样!
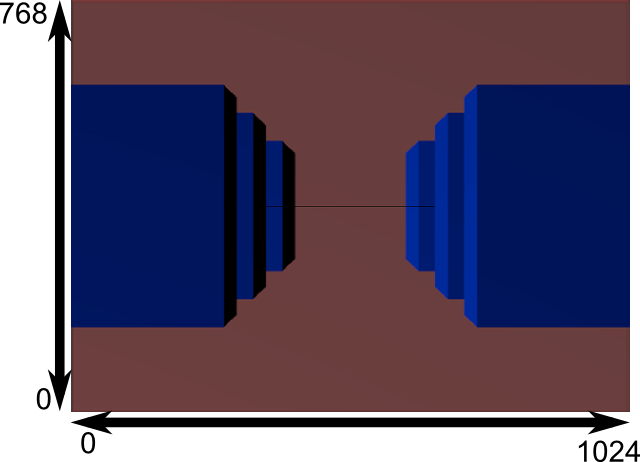
让我们从平截头体的”后面”看看它们的模样:
这就是您得到的图像!看上去太方方正正了,因此,还需要做一次数学变换使之适合实际的窗口大小。
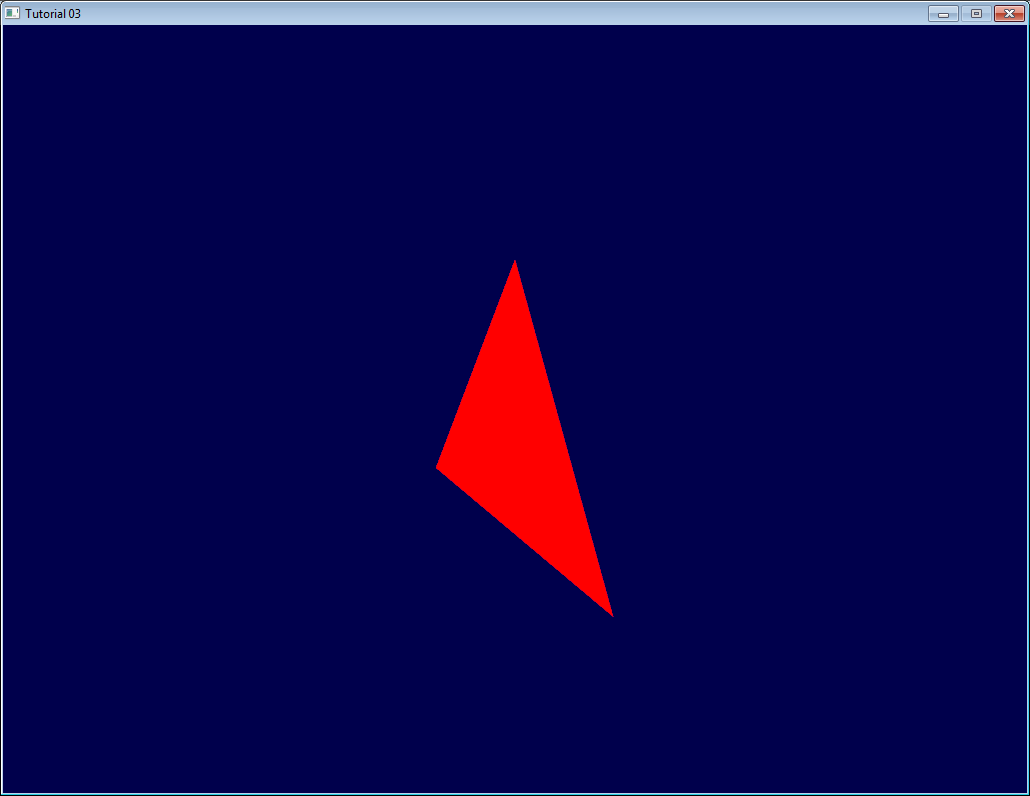
这就是实际渲染的图像啦!
复合变换:模型观察投影矩阵(MVP)
再来一连串深爱已久的标准矩阵乘法:
// C++ : compute the matrix
glm::mat4 MVPmatrix = projection * view * model; // Remember : inverted !
// GLSL : apply it
transformed_vertex = MVP * in_vertex;
总结
- 第一步:创建模型观察投影(MVP)矩阵。任何要渲染的模型都要做这一步。
// Projection matrix : 45° Field of View, 4:3 ratio, display range : 0.1 unit <-> 100 units
glm::mat4 Projection = glm::perspective(glm::radians(45.0f), (float) width / (float)height, 0.1f, 100.0f);
// Or, for an ortho camera :
//glm::mat4 Projection = glm::ortho(-10.0f,10.0f,-10.0f,10.0f,0.0f,100.0f); // In world coordinates
// Camera matrix
glm::mat4 View = glm::lookAt(
glm::vec3(4,3,3), // Camera is at (4,3,3), in World Space
glm::vec3(0,0,0), // and looks at the origin
glm::vec3(0,1,0) // Head is up (set to 0,-1,0 to look upside-down)
);
// Model matrix : an identity matrix (model will be at the origin)
glm::mat4 Model = glm::mat4(1.0f);
// Our ModelViewProjection : multiplication of our 3 matrices
glm::mat4 mvp = Projection * View * Model; // Remember, matrix multiplication is the other way around
- 第二步:把MVP传给GLSL
// Get a handle for our "MVP" uniform
// Only during the initialisation
GLuint MatrixID = glGetUniformLocation(programID, "MVP");
// Send our transformation to the currently bound shader, in the "MVP" uniform
// This is done in the main loop since each model will have a different MVP matrix (At least for the M part)
glUniformMatrix4fv(MatrixID, 1, GL_FALSE, &mvp[0][0]);
- 第三步:在GLSL中用MVP变换顶点
// Input vertex data, different for all executions of this shader.
layout(location = 0) in vec3 vertexPosition_modelspace;
// Values that stay constant for the whole mesh.
uniform mat4 MVP;
void main(){
// Output position of the vertex, in clip space : MVP * position
gl_Position = MVP * vec4(vertexPosition_modelspace,1);
}
- 搞定!三角形和第二课的一样,仍然在原点(0,0,0),然而是从点(4,3,3)透视观察的;摄像机的朝上方向为(0,1,0),视野(field of view)45°。
第6课中你会学到怎样用键鼠动态修改这些值,从而创建一个和游戏中类似的摄像机。但我们会先学给三维模型上色(第4课)、贴纹理(第5课)。
练习
- 试着修改glm::perspective的参数
-
试试用正交投影(orthographic projection )(glm::ortho)替换透视投影
- 其他不变,把模型矩阵运算的顺序改成平移-旋转-缩放,会有什么变化?如果对一个人物作变换,您觉得什么顺序”最好”呢?
附注
- *
- * 1 : […]好在用一个4x4矩阵就能表示这个投影:实际上,这句话并不正确。透视变换不是仿射(affine)的,因此,透视投影无法完全由一个矩阵表示。向量与投影矩阵相乘之后,齐次坐标的每个分量都要除以自身的W(透视除法)。W分量恰好是-Z(投影矩阵会保证这一点)。这样,离原点更远的点,除以了较大的Z值;其X、Y坐标变小,点与点之间变紧密,物体看起来就小了,这才产生了透视效果。