Шпаргалка з математики
Тригонометрія
Pi
const float pi = 3.14159265f; // але в реальності тут безкінечна послідовність
Косинус та синус
 (З http://commons.wikimedia.org/wiki/User:Geek3 , ліцензія GNU Free Documentation)
(З http://commons.wikimedia.org/wiki/User:Geek3 , ліцензія GNU Free Documentation)
Одиничне коло
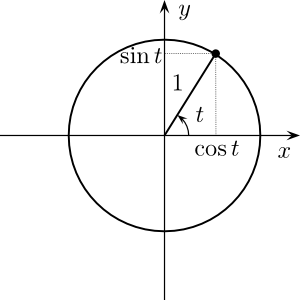
( Це модифіковане зображення http://en.wikipedia.org/wiki/User:Gustavb оригінальне зображення під ліцензією Crative Commons 3.0 )
t це кут в радіанах.
0 радіан = 0 градусів
180 градусів = Pi радіан
360 градусів ( повне коло ) = 2*Pi радіан
90 градусів = Pi/2 радіан
Вектора
Завжди знайте в яких координатах ваш вектор. Дивіться секцію 3 для деталей.
Однорідні координати
3D вектор - це (x,y,z), але 3D вектор з однорідними координатами - це (x,y,z,w).
- w=0 : це напрямок
- w=1 : це позиція
- щось інше : може бути коректним, але ви знаєте краще, що ви робите
Ви можете множити матрицю 4х4 тільки з вектором з однорідними координатами.
Довжина
Просто як декартова відстань : sqrt( x² + y² + z² ). w не рахується.
Векторний добуток (Cross product)
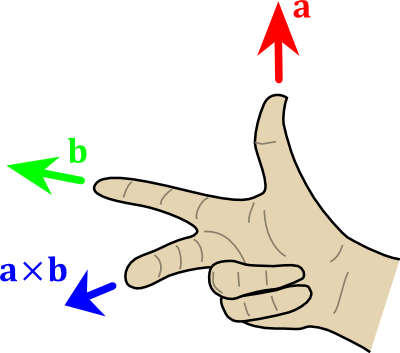
( Це модифіковане зображення http://en.wikipedia.org/wiki/User:Acdx , оригінальне зображення під ліцензією Creative Commons 3.0 )
Символ Х використовується для позначення векторного добутку. length( a x b ) == length(a) * length(b) * sin(θ), тому можливо ви захочете викликати normalize() для результату.
Скалярний добуток (Dot product)
##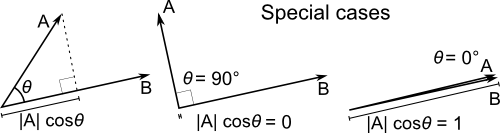
( З http://en.wikipedia.org/wiki/File:Dot_Product.svg )
A.B = length(A)*cos(Theta) , але зазвичай розраховується за формулою A.x*B.x +A.y*B.y +A.z*B.z
Додавання та віднімання
кодом :
res.x = A.x + B.x
res.y = A.y + B.y
...
Множення
кодом :
res.x = A.x * B.x
res.y = A.y * B.y
...
Нормалізація
Потрібно розділити вектор на його довжину :
normalizedVector = vec * ( 1.0f / vec.length() )
Матриця
Множення матриці на матрицю
Приклад переміщення (зсуву) матриці:
![]()
Множення матриці на вектор
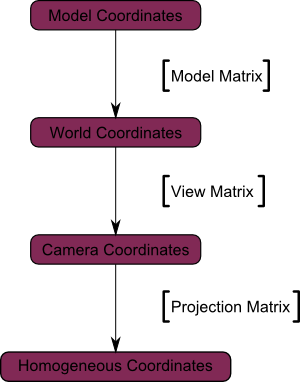
Звичайні трансформації
… але в шейдерах, ви можете використовувати вектори в дотичному просторі. А для обробки зображень - в просторі зображення. ‘res.x = A.x + B.x’